如果你的机器人的工作空间不够大,你能做什么?没必要急着买一个新机器人!辅助轴可以解决你所有的问题。
你已经投资了一个工业机器人来改善你的流程,但有一个问题。只是没有足够大的工作空间来满足你的需求。也许你的工件比你预期的要大得多,或者你需要机器人在两个不同的工作站上操作。
你应该买一个更大的机器人吗?
你应该改变你的流程吗?
也许你需要一个辅助轴!
辅助轴(又名外部轴)是一种很好的方式,可以在不改变设置的其他方面的情况下为机器人添加额外的工作包。根据《焊接生产力》杂志,在考虑机器人自动化时,选择是否使用辅助轴是“一个关键的决定”。
但是,什么是辅助轴,如何在脱机编程中使用它?ayx官方让我们一探究竟。
什么是辅助轴?
辅助轴或外轴是添加到机器人单元的任何额外机构,以增加额外的自由度和/或扩展机器人的运动范围。它们可以连接到机器人本身,也可以连接到工件上。
使用外部轴有很多好处,包括增加灵活性,能够在更大的工件上工作,以及访问以前无法到达的工作区区域。另一个额外的好处是降低成本——在某些情况下,使用一个带辅助轴的小型机器人比投资一个大型机器人更便宜。
然而,最明显的好处可能是工作时间的增加。从理论上讲,用辅助轴扩展机器人的工作空间是没有限制的。
3辅助轴的类型
的RoboDK机器人库有40个不同的外部轴制造商包括库卡,ABB和GUDEL。但是,虽然有很多不同的型号,但辅助轴基本上有3种类型:
1.线性跟踪
线性轨迹为机器人增加了一个单独的额外自由度。履带通常安装在地板上。然后机器人被安装在轨道上,并沿着轨道的长度移动。

来自机器人库的线性轨道的一个例子是KL4000该机器人的工作空间可增加30米,有效载荷可达4000公斤。
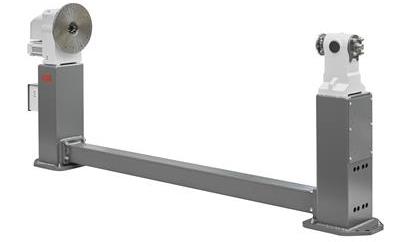
2.工件定位器
与线性轨迹不同,工件定位器不连接到机器人本身。相反,它们被用来固定工件。它们提供了额外的自由度,允许您在机器人操作工件时精确定位工件。
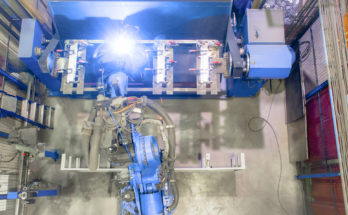
当使用工件定位器时,机器人通常固定在地面上。但是,通过将机器人固定在另一个辅助轴上,还可以进一步扩展机器人的灵活性。例如,这是一个8轴机器人加工应用的视频其中,所述机器人安装在线性轴上,并在附在工件定位器上的部件上操作。
机器人库中的工件定位器的一个例子是IRBP L来自ABB公司,该公司旨在为弧焊、热切割和机器人加工定位工件。
3.门式起重机
当您想将机器人安装在工作空间上方时,可以使用龙门吊。通过将机器人编程与起重机集成,可以极大地增加机器人的工作空间。龙门吊可以是单线性轴,XY笛卡尔机构,或XYZ机构。Z轴驱动可以改变机器人的高度,既可以通过提高和降低机器人本身,也可以在某些情况下通过提高和降低整个起重机。
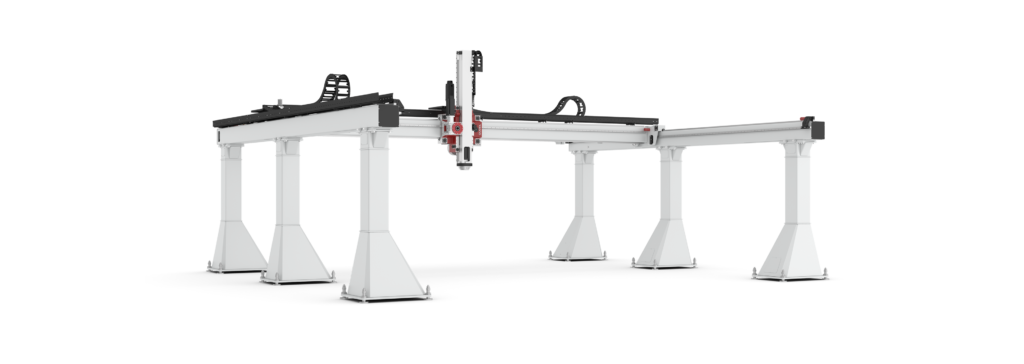
来自机器人图书馆的龙门吊的一个例子是GUDEL FP.它提供了一个XYZ驱动,用于物流、航空航天和汽车等行业。
5步使用辅助轴与离线编程ayx官方
以下是为脱机编程添加辅助轴的基本步骤。ayx官方
1.评估你的需求
首先,评估您对机器人单元的需求并决定辅助轴是否真的是正确的选择总是一个好主意。查看您的应用程序并计算出该任务需要多少工作空间。决定哪种类型的辅助轴将最好地满足这一需求。
当然,在投资真正的技术之前,您也可以使用离线编程作为一种ayx官方试验辅助轴的方式。如果是这样,你可能还不想做决定。
2.创建你的机制(或使用库)
如果您选择的辅助轴包含在机器人图书馆在美国,你只需要打开它,就可以立即开始使用它,就像你使用任何其他机器人一样。
然而,如果没有一个与你将要使用的轴相似的轴(例如,如果你有一个定制的轴),你也可以创建自己的机制。本页的文档介绍自定义机制窗口和这个视频教程展示了如何从头创建一个3轴笛卡尔机构。
3.连接你的机器人
一旦你有了辅助轴的工作模型,你只需要把机器人连接到它上面。在RoboDK中,这很容易做到。你只需将机器人模型加载到软件中,然后将其拖到辅助轴上。这将把机器人放在机构的正确位置上。
4.同步轴
现在你可以分别控制机器人和辅助轴。然而,离线编程的真正威力来自于将外部轴与机器人同步时。ayx官方你可以在RoboDK中右键点击程序树中的机器人模型,然后点击“同步外轴”。这将打开一个窗口,允许您同步机器人,线性轴和工件定位器。
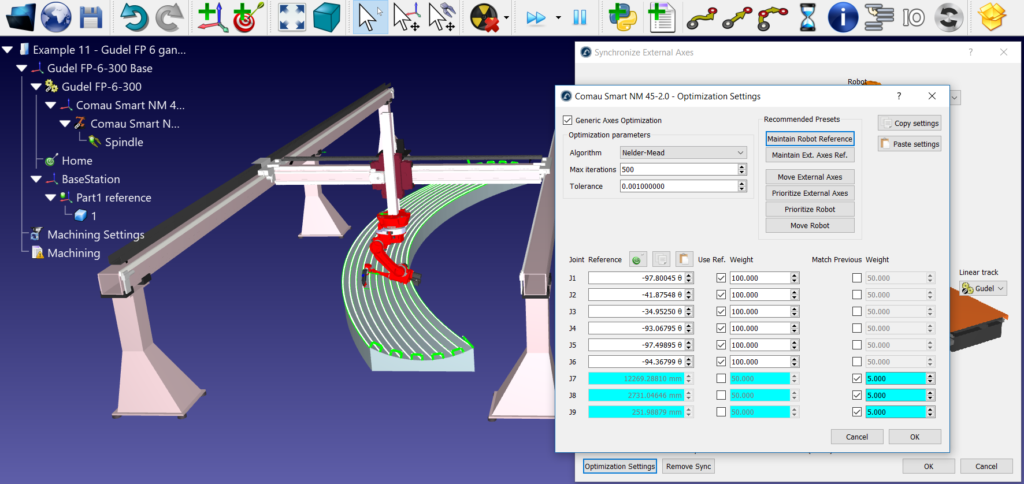
这意味着无论何时您移动机器人,如果您试图移动的位置不在机器人的工作空间内,它也将移动外轴。
5.给机器人编程
最后,您现在可以创建您的机器人程序!看看我们不断增长的教程视频目录例如如何在RoboDK中创建程序。
辅助轴真的有能力把你的机器人应用带到一个新的水平。当工作空间没有限制时,你可以做任何事情!
如何在机器人应用程序中使用辅助轴?请在下面的评论中告诉我们,或者加入讨论LinkedIn,推特,Facebook,Instagram或在RoboDK论坛.