
什么是力控制,为什么它对机器人加工更好?以下是如何在RoboDK中提高加工质量。
机器人是实现高质量加工的一种高度灵活的方式。尽管与数控机床相比,机器人的刚度相对较低,但它们能够执行广泛的加工任务。正如我们之前在文章中解释的那样,它们还有很多额外的好处机器人Mac能否超越数控机床h工人吗?
然而,有一个问题。硬材料是低刚度机器人的挑战。当刀具与坚硬材料表面接触时,机器人会发生偏转,钻出的孔变得不准确。对表面施加更大的力只会使问题变得更糟——机器人会更偏转,在极端情况下,会变得不稳定,不受控制地振动。
一旦你了解了基础知识,力量控制是克服这个问题的好方法。
什么是力量控制?
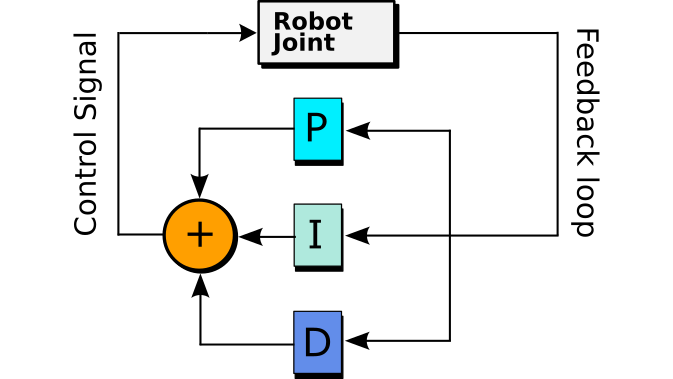
机器人基本上只是一种先进的控制系统。像其他控制系统一样,它们由反馈回路控制。机械臂最常见的设置是有一个个体PID控制器对于每个关节,这确保了当关节被指示移动到那里时,它实际上到达了所需的位置。
机器人技术中常用的控制有两种:运动控制和力控制。
运动控制
机器人应用的基本控制方法是位置控制。在这种情况下,机器人程序指示机器人的每个关节移动到一个位置。然后,每个关节的PID控制器使用来自位置传感器的信号作为反馈,以检测何时到达所需的位置。
当给机器人一个联合行动命令,每个关节将尽快移动到所需的位置。当一个线性移动或循环移动使用时,机器人控制器会发送一系列的位置指令来实现路径的控制。
位置控制是运动控制方法中的一种,其他的还有速度控制和加速度控制。这些都是相互关联的,因为速度是位置的导数,加速度是速度的导数。
力的控制
力控制比运动控制更复杂,因为它应用在机器人工具上,而不是一个关节一个关节的基础上。一个力-扭矩传感器连接到机器人的手腕上,作为反馈来检测施加在工具上的力。
力控制器不是试图到达特定的位置,而是试图在工具上实现特定的力。机器人将对环境施加越来越大的力,直到达到所需的力。
有几种力控制方法,但最常用的加工操作是混合位置/阻抗控制。当机器人在自由空间中移动时,这与位置控制完全相同。然而,当它与某物碰撞时,机器人就像一个虚拟的弹簧——机器人从指示位置移动得越远,它就会施加更大的力来尝试将其返回到正确的位置。通过设置虚拟弹簧的刚度,可以限制机器人可以施加的最大力。
力控制对机器人加工的好处
力控制通常更适合于加工操作,因为可以精确控制施加在工件材料上的力。这提高了钻井作业的质量,如下例所示。
想象一下,你正在用一个手持电钻在一块钢板上钻一个洞。你把钻头对准你想要钻孔的位置。

你会用这两种方法中的哪一种来施加一个力?
- 开始时要轻轻施压,直到洞开始形成,然后逐渐加大力度。
- 立即用你最大的力气把钻头推到金属上。
希望您选择了第一个选项。
为什么第二种选择不可行?如果你曾经用钻头这样做过,你就会知道钻头要么在材料上不受控制地滑动,要么就会立即断裂。几个方向的力量都太大了。要么是你顺从的手臂承受不了这些力,要么是钻头承受不了。
当机器人被指示只使用位置控制钻入材料时,它相当于使用第二种方法。机器人无法检测到力量,所以它会尽可能地推动它的马达。
力控制确保施加的力永远不会达到如此高的力。
如何在RoboDK中使用力控制
在RoboDK中,有两种方法可以为你的机器人添加力控制器。由于力控制是一种先进的控制方法,它们确实需要您使用编程。

选项1:创建一个自定义后处理器
也许最简单的选择是为你的机器人创建一个自定义后处理器,并在其中包含力控制命令。
后处理器将你的RoboDK模拟转换成机器人可以理解的代码。查看我们之前的文章有关如何创建自定义后处理程序的信息。
如果你的机器人可以从制造商那里得到力控制,那么这个选择就会容易得多。例如,KUKA IIWA具有阻抗控制模式哪些可以在几行代码中被激活.
如果没有这样的选择,你必须用机器人编程语言编写自己的力控制器,或者从机器人制造商的合作伙伴那里获得另一种解决方案。
选项2:使用RoboDK API
第二种选择是使用您的计算机通过RoboDK API直接控制机器人。这允许你在计算机上通过使用RoboDK作为主控制器和机器人控制器作为从控制器来实现力控制器。
这个选项的优点是,即使机器人制造商没有提供力控制,您也可以使用它。使用其中一种语言RoboDK支持(Python, c#, c++和Matlab),您可以选择许多库和api,这可以更容易地实现您选择的控制器。
这当然不是一个“现成的解决方案”,因为你几乎肯定必须做大量的编程来让控制器可靠地工作。然而,这是一个灵活的选择,可以与大多数机器人一起使用。
值得庆幸的是,越来越多的机器人制造商正在为他们的机器人提供力控制,要么是他们自己,要么是通过第三方合作伙伴。只需稍加研究,无需大量编程,就可以使用RoboDK通过力控制来提高机器人加工的质量。
关于武力控制你有什么问题吗?请在下面的评论中告诉我们,或者加入讨论LinkedIn,推特,Facebook,Instagram或在RoboDK论坛.


