
也许你来RoboDK是为了寻找一个它似乎没有的杀手级功能。或者也许你已经使用它一段时间了,你想从中得到更多。
你可能会想,你所选择的功能有可能在RoboDK中实现吗?
以下是一些你可能还不知道的强大功能。
我们一直在升级RoboDK。我们有一个非常活跃的用户群,多年来,你们中的许多人都建议进行新的调整、升级和功能,我们已经将其集成到RoboDK中,使其变得更好。
但是,您可能想知道是否有您可能错过的功能。
当机器人软件没有你的杀手锏功能时该怎么办
有时候,我们使用一款新软件寻找一组关键功能,但我们会失望。当我们没有看到我们需要的那个杀手级特性时,我们就会立即放弃这个软件,转而使用清单上的下一个软件。
当人们在寻找新的机器人编程软件时,这种情况可能会发生。他们最终会从一个软件跳到另一个软件,不断地尝试各种软件爱游戏ayx正网但绝不停留在一个软件包上。
但是,这些人正在错过。
有不止一种方法可以在机器人软件包中获得杀手级功能。在RoboDK中,有一种非常强大的方式来添加新功能,甚至很少有人意识到。
鲜为人知的RoboDK插件的超级大国
与许多机器人软件包不同,RoboDK是非常可扩展的。有许多方法可以添加新功能和扩展软件的功能,只需一点点编程。
在最基本的层面上,你可以在RoboDK中使用Python编程。这允许您直接使用这种简单而流行的编程语言来编程您的机器人。
您还可以通过使用扩展软件的功能RoboDK API连接外部代码与RoboDK。另外,你可以使用CAD/CAM插件将RoboDK与许多流行的CAD/CAM程序连接起来。
但是,有一种方法可以扩展RoboDK的功能,使您能够增强RoboDK本身的本机功能。
RoboDK插件是一个非常强大的方式添加几乎任何功能,你可能会想到的软件。
您可以使用我们现有的插件来访问我们已经开发的不太为人所知的功能,或者您可以创建自己的插件。
9个你可能不知道的RoboDK插件
现在已经有一组现有的插件,可以通过点击按钮来提高RoboDK的功能。
这个系列一直在增长和变化,但在这里我们将向你展示9个你可能还不知道的RoboDK副本中可用的插件。你可以通过“工具>插件”来访问这些插件。
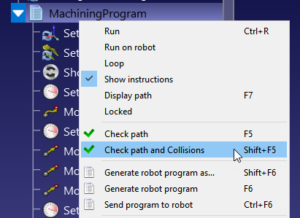
1.无碰撞计划
一个备受期待的插件是我们的无碰撞计划器。这允许您在机器人工作空间的两点之间自动创建机器人运动,而不会与任何物体碰撞。有关此功能的更多信息,请查看我们的博客文章计划表是如何工作的.
2.重力
重力在工业机器人仿真中通常不常用。然而,在一些应用程序中,对象的行为就像它们在现实世界中一样可能是有用的。重力插件允许您为此类应用程序激活一个简单的重力形式。
3.托盘包装
码垛是物流中最常见的机器人任务之一。这是一个扩展的拾取和放置任务,其中对象以规则的模式放置在托盘上。新的码垛插件为您提供了自动创建该模式并为机器人创建控制动作的功能。

4.实时
大多数人使用RoboDK对机器人进行离线模拟编程,然后将程序下载到机器人本身。这并不需要实时性能。然而,也可以实时控制机器人,为此你可能需要实时插件。看看这篇博客上的例子.
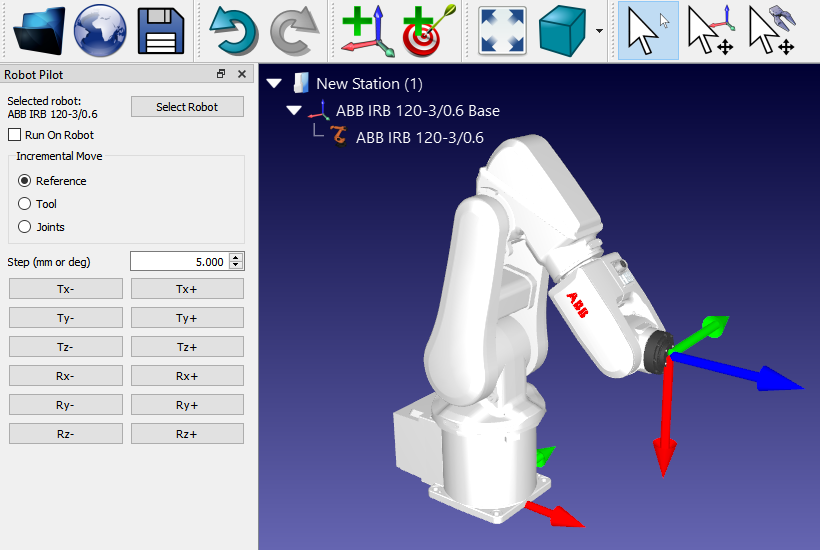
5.自动驾驶仪
Robot pilot是一个简单的插件,允许你点击一个按钮来移动机器人,就像用机器人的教学吊坠“慢跑”一样。您只需选择是否要移动机器人的参考,工具或关节,然后单击相应的按钮,以移动机器人的定义量。
6.OPC-UA
的OPC统一架构是一种机器对机器通信协议。它是平台独立的,专门设计用于在工业环境中进行开放、安全的通信。广泛应用于汽车制造、食品制造、包装等行业。OPC-UA平台允许RoboDK与其集成。
7.Chip8模拟器
Chip8是一种非常简单的编程语言这在过去被用于游戏设计。这个有趣的插件是由嵌入式系统专家Phillip May开发的。它展示了如何在RoboDK中编程机器人来模拟Chip8处理器,真正展示了插件的编程能力!你甚至可以载入你自己的游戏rom。
8.你的插件
RoboDK插件界面的真正强大之处在于你可以创建自己的插件。这样做的限制只在于你的想象力和你的编码能力。请查看我们的插件示例插件界面Github页面看看它是怎么做的。
9.应用程序加载器
最后,你甚至不需要创建一个插件来获得同样的好处!AppLoader插件为您提供了一种方法,可以轻松地将脚本和可执行文件加载到RoboDK中,就像它们是插件一样。请查看AppLoader Github页面欲知详情。
如何从RoboDK插件中获得最多
上面的插件都很棒,但RoboDK插件的真正力量来自于你开始为自己创建它们。
当您想到软件还没有的杀手级特性时,您不再需要担心。
你可以自己创建它!
或者,您可以在我们的流行中提交请求功能请求论坛线程.
你希望在RoboDK中看到什么功能?请在下面的评论中告诉我们,或者加入讨论LinkedIn,推特,Facebook,Instagram,或在RoboDK论坛.


