Robodk提示
完整的文档
3D鼠标导航
选择 |
平底锅 |
旋转 |
飞涨 |
 |
 |
 |
 |
| 左点击 按住CTRL选择多个对象 |
保持中间按钮 或者 保持Ctrl+Alt并选择 |
按住右键单击 或者 握住Ctrl+Shift并选择 |
移动鼠标车轮 或者 举行并选择 |
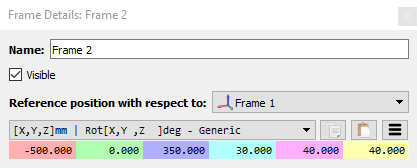
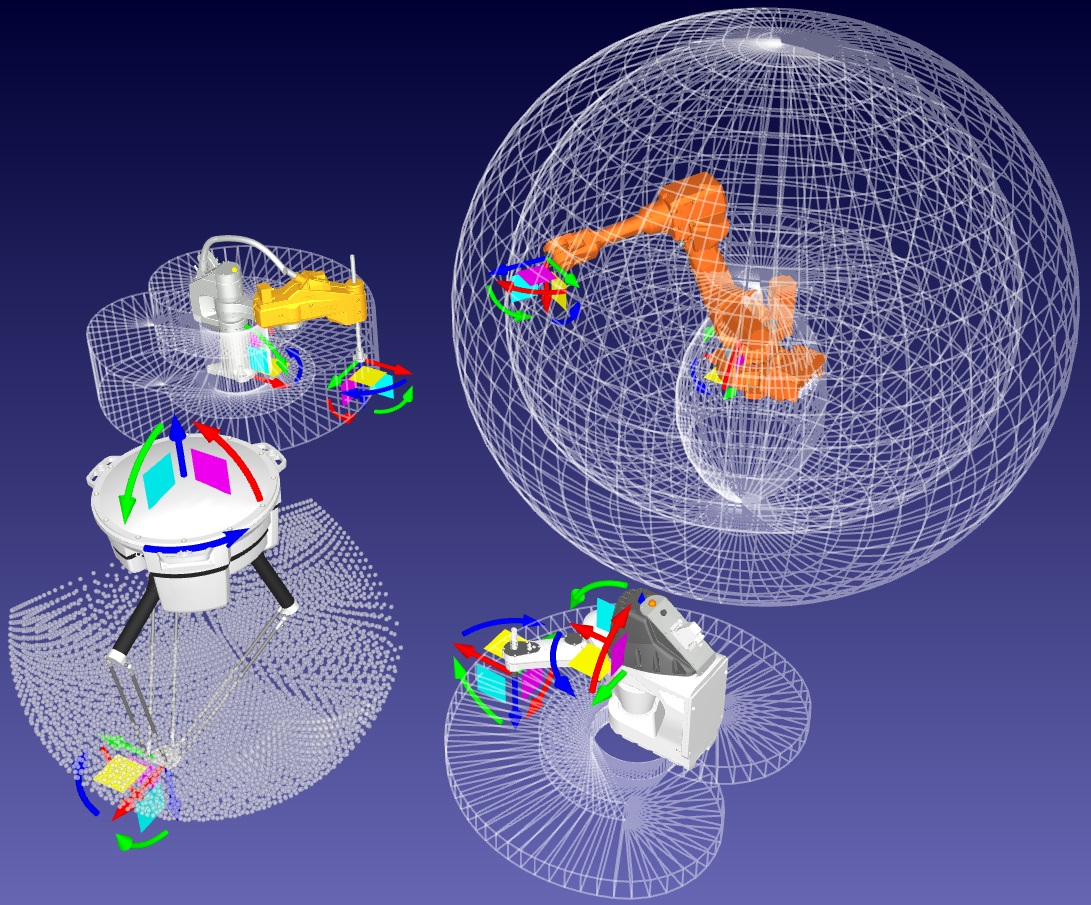
参考帧
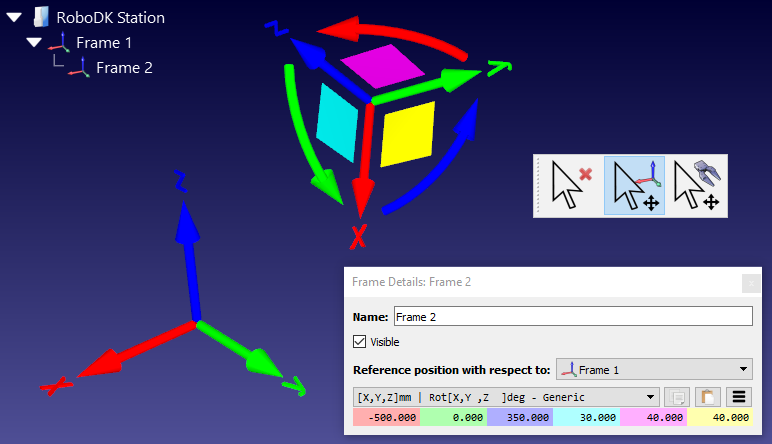
参考帧允许将对象相互贴合。拖动站点树中的任何参考框架或对象,以创建嵌套的参考帧。
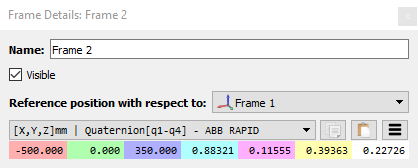
通过在3D视图上选择ALT键来移动参考帧。也可以手动输入特定于任何机器人的翻译和旋转值,包括四个元素值和不同类型的欧拉旋转。在菜单中选择首选的Euler方向:工具选项默认默认欧拉角模式。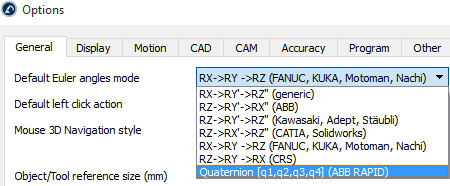
选择右侧的按钮以复制/粘贴从/到值数组或4x4姿势的值。
默认的欧拉角
季节值
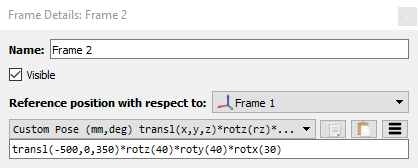
自定义翻译和方向
键盘快捷键
| alt |  |
移动参考帧,机器人或其他对象 |
| Alt+Shift |  |
移动机器人TCP(工具) |
| CTRL+0 |  |
将3D视图拟合到选定的对象 |
| F1 |  |
显示Robodk文档 |
| F2 | 重命名项目 | |
| F6 | 生成程序 | |
| F7 | 显示/隐藏选定的对象 | |
| + | 使框架更大 | |
| - | 使框架较小 | |
| / | 显示/隐藏文字 | |
| * | 显示/隐藏机器人工作区 | |
| Ctrl + 1 | 加载最后一个文件或Robodk站 |
菜单图标
 |
从计算机加载文件。支持格式: |
 |
打开在线图书馆 |
 |
保存车站 |
 |
添加参考框 |
 |
添加机器人目标 |
|
移动参考框架 |
|
移动机器人TCP(工具) |
 |
激活碰撞检查。碰撞状态中的项目将以红色显示。 |
 |
快速模拟 |
 |
添加Python脚本(宏) |
 |
添加新机器人程序 |
 |
添加联合举动 |
 |
添加线性移动 |
 |
将模拟导出为3D HTML或3D PDF文档 |
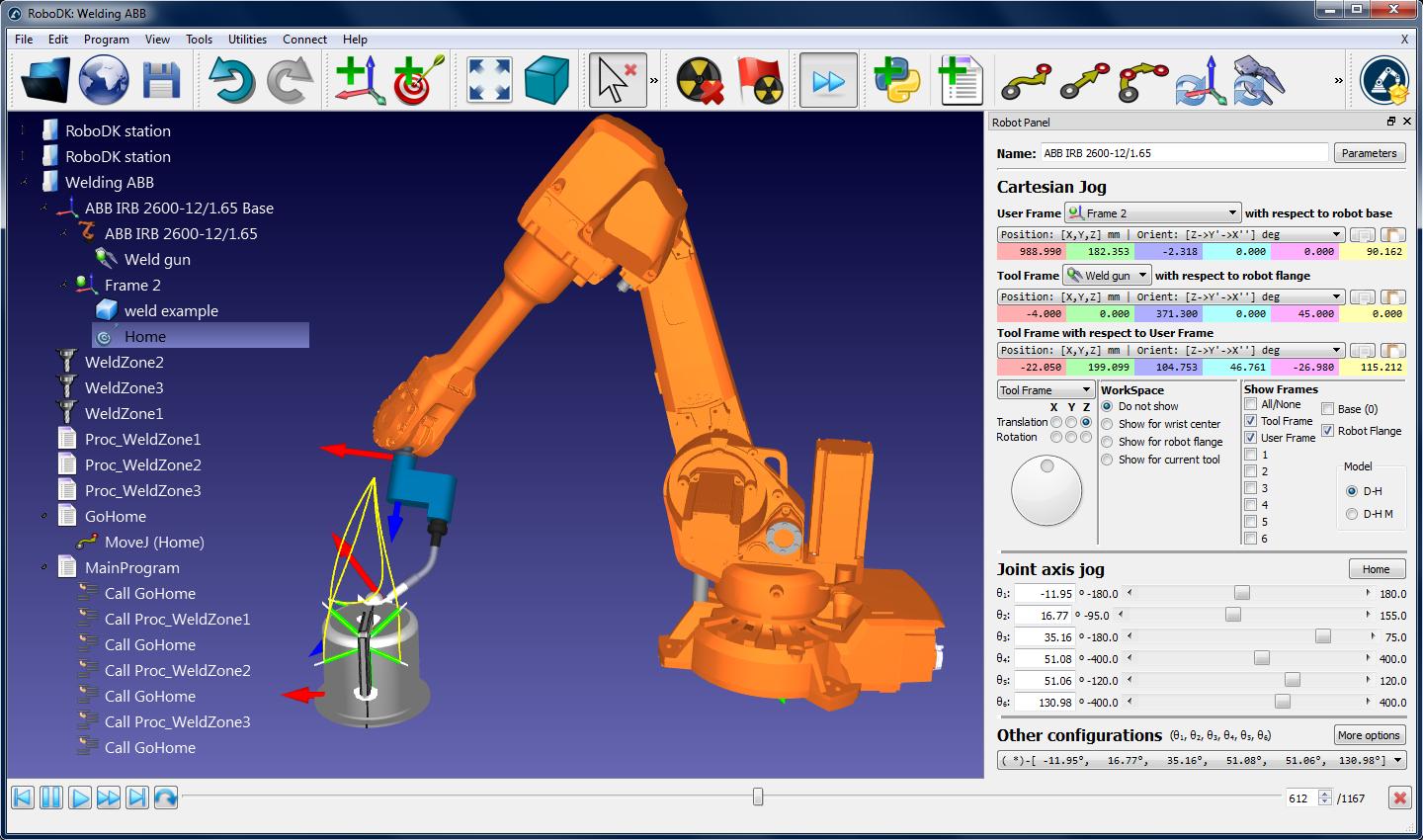
机器人控制和仿真
双击机器人以打开机器人面板,然后按轴或笛卡尔空间慢跑机器人轴。可以在此窗口中修改机器人工具(TCP)和参考帧。
双击程序以查看模拟。
创建机器人工具(TCP)
可以通过导入3D对象并将其拖放到机器人来轻松创建机器人工具。然后将对象自动转换为工具。导入3D对象以建模单元格。接受的3D格式包括STL,IGE和步骤文件。
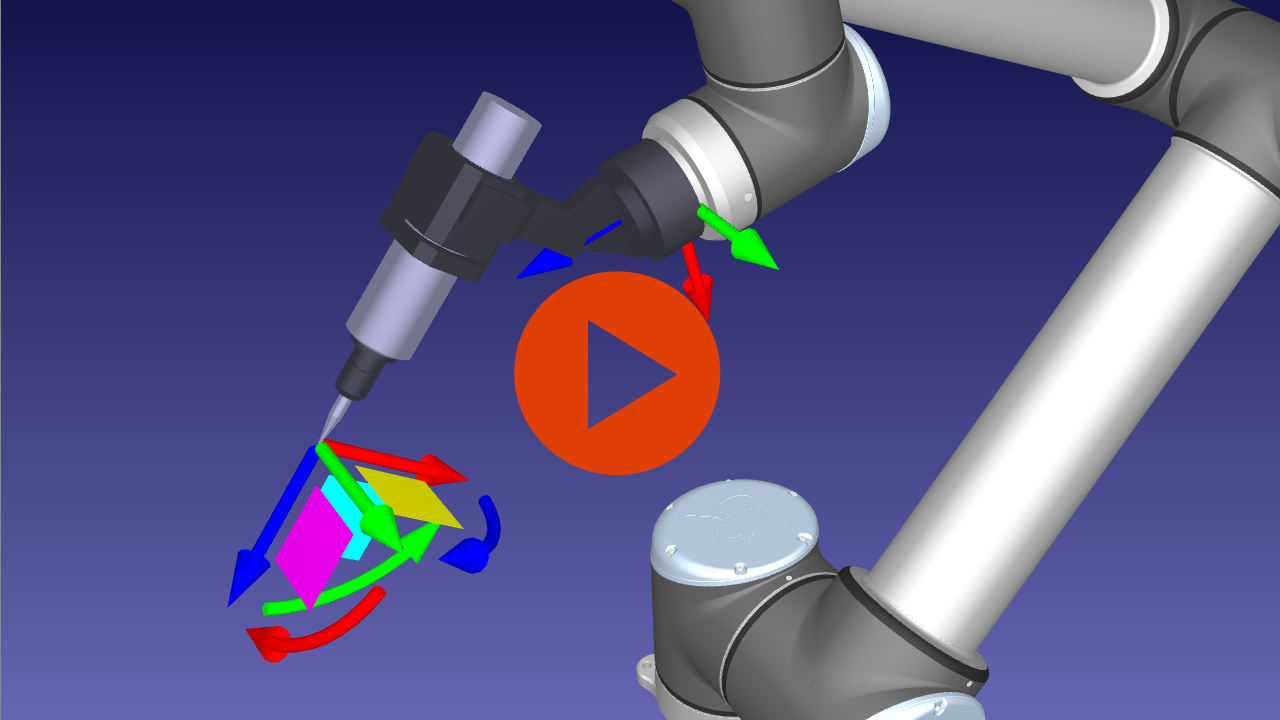
以3D格式导出模拟
一旦准备就绪,就将其导出为3D HTML模拟或3D PDF。此功能允许轻松共享布局和仿真概念。
3D PDF仿真文档的示例(必须使用Acrobat Reader打开3D PDF模拟,而不是浏览器)
提示:HTML模拟大于PDF模拟,压缩它们将大大降低其大小。HTML仿真没有任何依赖项,可以作为一个文件共享。
- 0:02选择文件出口模拟以导出所需格式的模拟
- 0:11开始按钮将开始录制模拟
- 0:28 3D HTML模拟允许在3D中导航并控制模拟时间
- 0:55 3D PDF模拟还允许在3D中导航并控制模拟时间
创建或修改机器人邮政处理器
机器人邮政处理器定义了应如何生成机器人程序。模拟器移动到特定机器人指令的转换是由后处理器完成的。后处理器提供了完全灵活性,以生成针对特定要求的机器人程序。
Robodk为大多数机器人品牌提供后处理器。可以轻松创建或修改后处理器。Robodk中的一个邮政处理器只是一个python文件,它定义了应如何生成代码。每个机器人品牌都使用默认的后处理器,可以修改以自定义程序生成并更好地适应特定应用程序。
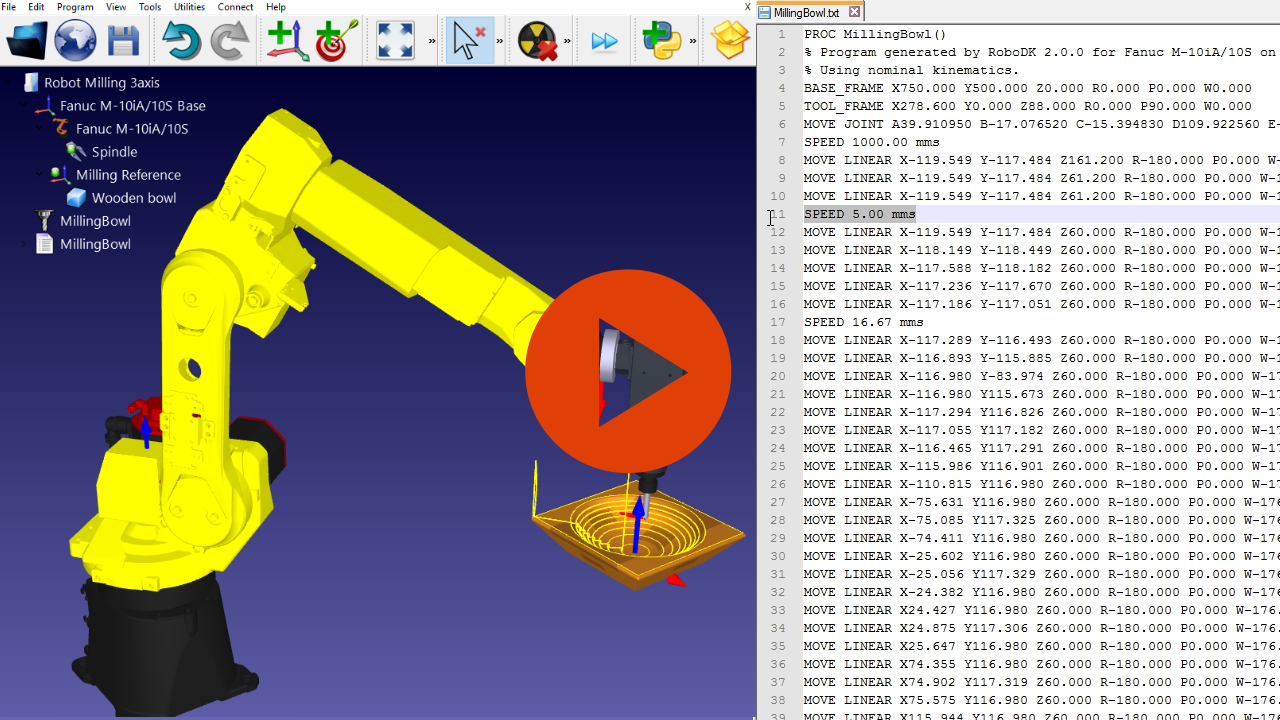
提示:双击邮政处理器以查看示例机器人程序的预览。
- 0:17准备程序后,选择F6生成机器人程序
- 0:35通过选择Program-ADD/编辑Post处理器创建或修改Post处理器
- 0:56编辑关节和线性运动命令以获得预期的结果
- 1:16右键单击程序,然后选择“选择邮政处理器”以选择邮政处理器